
DÉFI et CONSTRUCTION
Place ton Roverbot face à un mur, fais-le avancer tout droit jusqu’à ce qu’il heurte ce mur, puis fais-le reculer pendant le même laps de temps.
Crée ton propre Roverbot ou regarde dans la section Roverbot de la Constructopedia comment construire un modèle de base Roverbot.
Ton Roverbot a besoin de :
– 2 moteurs
– des fixations pour roues
– 1 pare-chocs simple
++++
PROGRAMMATION

Commande à ton Roverbot :
– 1) d’avancer jusqu’à ce qu’il touche le mur avec son détecteur de contact
– 2) de reculer pendant le même temps
++++
LES BLOCS LOGIQUES
Tu auras besoin :
– de blocs de code RCX vert "Avancer", "Reculer", "Arrêter moteur ABC"
Il faudra récupérer la valeur du temps mis par le robot pour toucher le mur. Tu auras besoin :
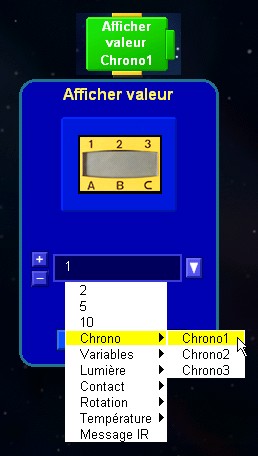
– de blocs logiques "Afficher valeur" du menu "Com" des Petits blocs

– d’un bloc logique "Définir" du menu "Variable" des Petits blocs


– d’un bloc "Répéter jusqu’à contact" orange.

++++
CONTRÔLE
Est-ce que ton Roverbot :
– a avancé jusqu’au mur pendant un certain temps ?
– a touché le mur ?
– a reculé pendant le même temps.